Advection for Vorticity
The reason why we need to process the advection for vorticity seperately is due to the conservation of enstrophy.
According to Arakawa (1966), the enstrophy needs to be conserved to do the long-term integration.
Here, the J6 Arakawa jacobian is adopted to conserve the enstrophy following the techinical report in Jung (2005) for 3DVVM.
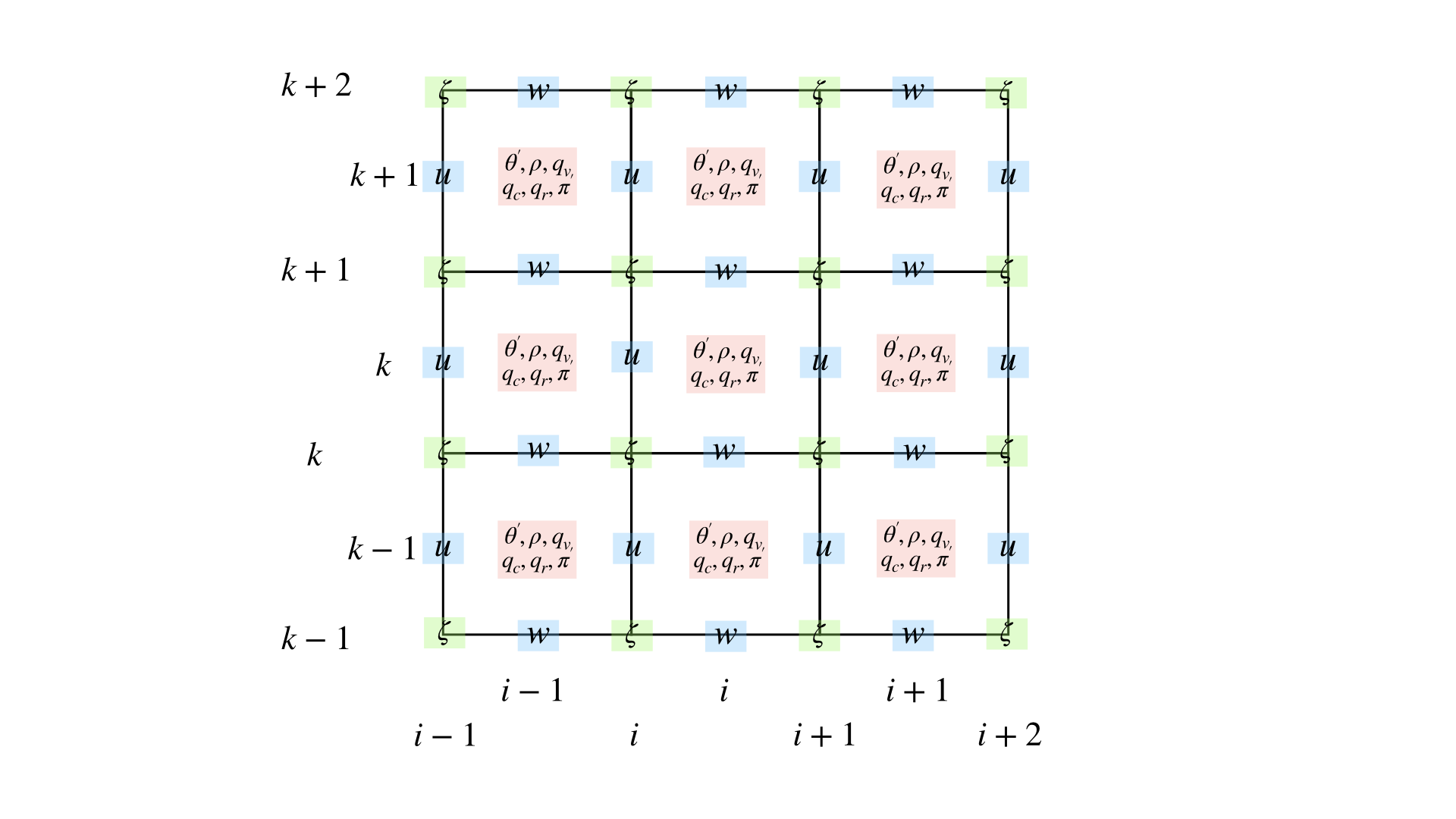
\[\frac{\partial \zeta}{\partial t} = -\frac{\partial u\zeta}{\partial x} - \frac{1}{\overline{\rho}}\frac{\partial \overline{\rho}w\zeta}{\partial z} = -\frac{1}{dx} (F_r - F_l) - \frac{1}{dz} (F_u - F_d) \tag{12}\]
\[\begin{split}F_r &= U_{i,k}(\zeta_{i+1,k} - \zeta_{i,k}),\ F_l = U_{i-1,k}(\zeta_{i,k} - \zeta_{i-1,k})\\
F_u &= W_{i,k}(\zeta_{i,k+1} - \zeta_{i,k}),\ F_d = W_{i,k-1}(\zeta_{i,k} - \zeta_{i,k-1})\\
U_{i,k} &= 0.25 \times (\overline{\rho}_k(u_{i+1,k} + u_{i,k}) + \overline{\rho}_{k-1}(u_{i+1,k-1} + u_{u,k-1}) )\end{split}\]
Solving 2D Poisson equation to diagnize \(w\)
\[\begin{split}\bar{\rho}\frac{\partial \zeta}{\partial x} &= \frac{\partial^2 w}{\partial x^{2}} + \frac{\partial}{\partial z}\left(\frac{1}{\overline{\rho}}\frac{\partial (\overline{\rho}w)}{\partial z}\right)\\
\Rightarrow \overline{\rho}^2\frac{\partial \zeta}{\partial x} &= \frac{\partial^2 \bar{\rho}w}{\partial x^{2}} + \bar{\rho}\frac{\partial}{\partial z}\left(\frac{1}{\overline{\rho}}\frac{\partial (\overline{\rho}w)}{\partial z}\right)\\\end{split}\]
\[\begin{split}\frac{\overline{\rho_{w,k}}^2}{dx}(\zeta_{i+1,k}-\zeta_{i,k}) = &\frac{1}{dx^2}(\overline{\rho_{w,k}}w_{i+1,k} - 2\overline{\rho_{w,k}}w_{i,k} + \overline{\rho_{w,k}}w_{i-1,k})\\ +
&\frac{1}{dz^2}(\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}}\overline{\rho_{w,k}}w_{i,k+1} - (\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}) \overline{\rho_{w,k}}w_{i,k} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}\overline{\rho_{w,k-1}}w_{i,k-1} )\end{split}\]
The discretization form can be written into matrix form \(A\vec{w} = \vec{b}\).
First, the boundary condition should be given. The periodic boundary is adopted in x-direction and the rigid boundary condition is given in z-direction.
Assume there are n grids in x-direction, m grids in z-direction.
For x-direction: \(w_{0,k} = w_{nz-2,k},\ w_{nz-1,k} = w_{1,k}\).
For z-direction: \(w_{i,0} = w_{i,nz-1} = 0\) are boundaries, and \(w_{i,1} = 0\) is physical ground and prescribed to be 0.
The dimension of A would be \(((nx-2)(nz-3),\ (nx-2)(nz-3))\), and \(\vec{w},\ \vec{b}\) would be ((nx-2)*(nz-3)).
In this model, dx = dz. The matrix A can be written as below:
\[\begin{split}\begin{equation*}
A =
\begin{bmatrix}
~D & E & ~0 & ~0 & ~0 & \ldots & ~0 \\
F & ~D & E & ~0 & ~0 & \ldots & ~0 \\
~0 & F & ~D & E & ~0 & \ldots & ~0 \\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots \\
~0 & \ldots & ~0 & F & ~D & E & ~0 \\
~0 & \ldots & \ldots & ~0 & F & ~D & E \\
~0 & \ldots & \ldots & \ldots & ~0 & F & ~D
\end{bmatrix}
\end{equation*}\end{split}\]
\[\begin{split}\begin{equation*}
D =
\begin{bmatrix}
-2-(\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}) & 1 & ~0 & ~0 & ~0 & \ldots & ~1 \\
1 & -2- (\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}})& 1 & ~0 & ~0 & \ldots & ~0 \\
~0 & 1 & -2- (\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}})& 1 & ~0 & \ldots & ~0 \\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots \\
~0 & \ldots & ~0 & 1 & -2- (\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}) & 1 & ~0 \\
~0 & \ldots & \ldots & ~0 & 1 & -2- (\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}) & 1 \\
~1 & \ldots & \ldots & \ldots & ~0 & 1 & -2-(\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} + \frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}})
\end{bmatrix}
\end{equation*}\end{split}\]
\[\begin{split}\begin{equation*}
E =
\begin{bmatrix}
~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} & 0 & ~0 & ~0 & ~0 & \ldots & ~0 \\
0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} & 0 & ~0 & ~0 & \ldots & ~0 \\
~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} & 0 & ~0 & \ldots & ~0 \\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots \\
~0 & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} & 0 & ~0 \\
~0 & \ldots & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}} & 0 \\
~0 & \ldots & \ldots & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k}}}
\end{bmatrix}
\end{equation*}\end{split}\]
\[\begin{split}\begin{equation*}
F =
\begin{bmatrix}
~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}} & 0 & ~0 & ~0 & ~0 & \ldots & ~0 \\
0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}} & 0 & ~0 & ~0 & \ldots & ~0 \\
~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}} & 0 & ~0 & \ldots & ~0 \\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots \\
~0 & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}} & 0 & ~0 \\
~0 & \ldots & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}} & 0 \\
~0 & \ldots & \ldots & \ldots & ~0 & 0 & ~\frac{\overline{\rho_{w,k}}}{\overline{\rho_{u,k-1}}}
\end{bmatrix}
\end{equation*}\end{split}\]
\[\begin{split}\vec{w} = \begin{bmatrix}
w_{1,2} \\
w_{2,2} \\
\vdots \\
w_{nx-2,2} \\
w_{1,3} \\
w_{2,3} \\
\vdots \\
w_{nx-2,3} \\
\vdots \\
w_{1,nz-2} \\
w_{2,nz-2} \\
\vdots \\
w_{nx-2,nz-2} \\
\end{bmatrix}\end{split}\]
\[\begin{split}\vec{b} = dx\begin{bmatrix}
\overline{\rho_{w,2}}^2(\zeta_{2,2}-\zeta_{1,2}) \\
\overline{\rho_{w,2}}^2(\zeta_{3,2}-\zeta_{2,2}) \\
\vdots \\
\overline{\rho_{w,2}}^2(\zeta_{nx-2,2}-\zeta_{nx-3,2}) \\
\overline{\rho_{w,3}}^2(\zeta_{2,3}-\zeta_{1,3}) \\
\overline{\rho_{w,3}}^2(\zeta_{3,3}-\zeta_{2,3}) \\
\vdots \\
\overline{\rho_{w,3}}^2(\zeta_{nx-2,3}-\zeta_{nx-3,3}) \\
\vdots \\
\overline{\rho_{w,nz-2}}^2(\zeta_{2,nz-2}-\zeta_{1,nz-2}) \\
\overline{\rho_{w,nz-2}}^2(\zeta_{3,nz-2}-\zeta_{2,nz-2}) \\
\vdots \\
\overline{\rho_{w,nz-2}}^2(\zeta_{nx-2,nz-2}-\zeta_{nx-3,nz-2}) \\
\end{bmatrix}\end{split}\]
Solving 1D Poisson equation to diagonize \(u\)
\[\frac{\partial^2 \chi}{\partial x^2} = -\frac{1}{\bar{\rho}}\frac{\partial \bar{\rho} w}{\partial z}\]
\[\frac{1}{dx^2}(\chi_{i+1,nz-2}-2\chi_{i,nz-2}+\chi_{i,nz-2}) = -\frac{1}{dz}(\frac{1}{\overline{\rho_{u,nz-2}}}(0 - \overline{\rho_{w,nz-2}} w_{i,nz-2}))\]
\[\begin{split}\begin{equation*}
G =
\begin{bmatrix}
~-2 & 1 & ~0 & ~0 & ~0 & \ldots & ~1 \\
1 & ~-2 & 1 & ~0 & ~0 & \ldots & ~0 \\
~0 & 1 & ~-2 & 1 & ~0 & \ldots & ~0 \\
\vdots & \ddots & \ddots & \ddots & \ddots & \ddots & \vdots \\
~0 & \ldots & ~0 & 1 & ~-2 & 1 & ~0 \\
~0 & \ldots & \ldots & ~0 & 1 & ~-2 & 1 \\
~1 & \ldots & \ldots & \ldots & ~0 & 1 & ~-2
\end{bmatrix}
\end{equation*}\end{split}\]
\[\begin{split}\vec{\chi} = \begin{bmatrix}
\chi_{1,nz-2} \\
\chi_{2,nz-2} \\
\vdots \\
\chi_{nx-2,nz-2} \\
\end{bmatrix}\end{split}\]
\[\begin{split}\vec{h} = dx\begin{bmatrix}
\frac{1}{\overline{\rho_{u,nz-2}}}\overline{\rho_{w,nz-2}}w_{1,nz-2} \\
\frac{1}{\overline{\rho_{u,nz-2}}}\overline{\rho_{w,nz-2}}w_{2,nz-2} \\
\vdots \\
\frac{1}{\overline{\rho_{u,nz-2}}}\overline{\rho_{w,nz-2}}w_{nx-2,nz-2} \\
\end{bmatrix}\end{split}\]